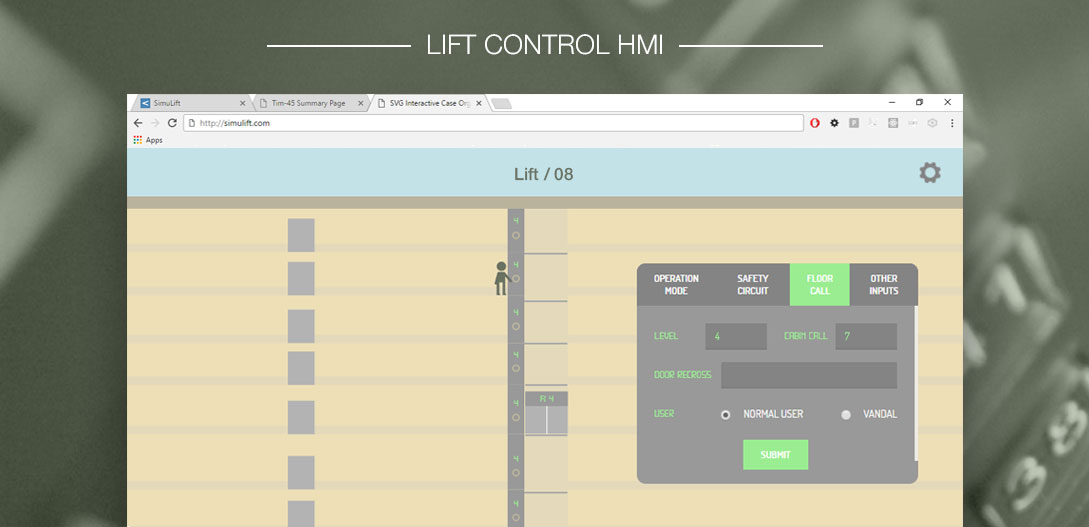
Here we show the browser interface that allows developer to reconfigure the simulated Lift on the fly, visualize current operation and generate system events such as person floor calls or faults.
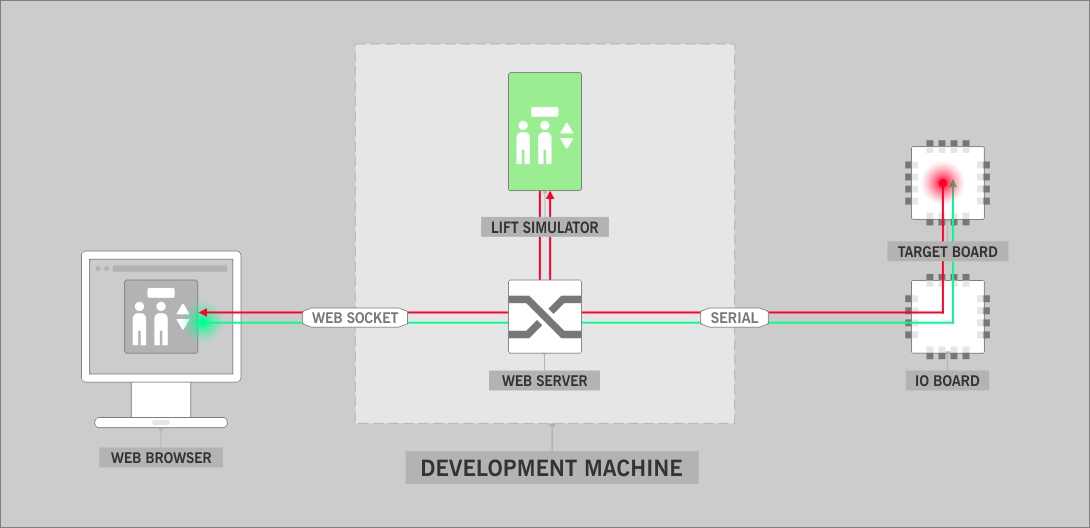
We present here an overall architecture diagram of the system. The central "Web Server" is built using Python/Twisted/Crossbar. It allows to interconnect IO board serial port, browser HMI and simulation.
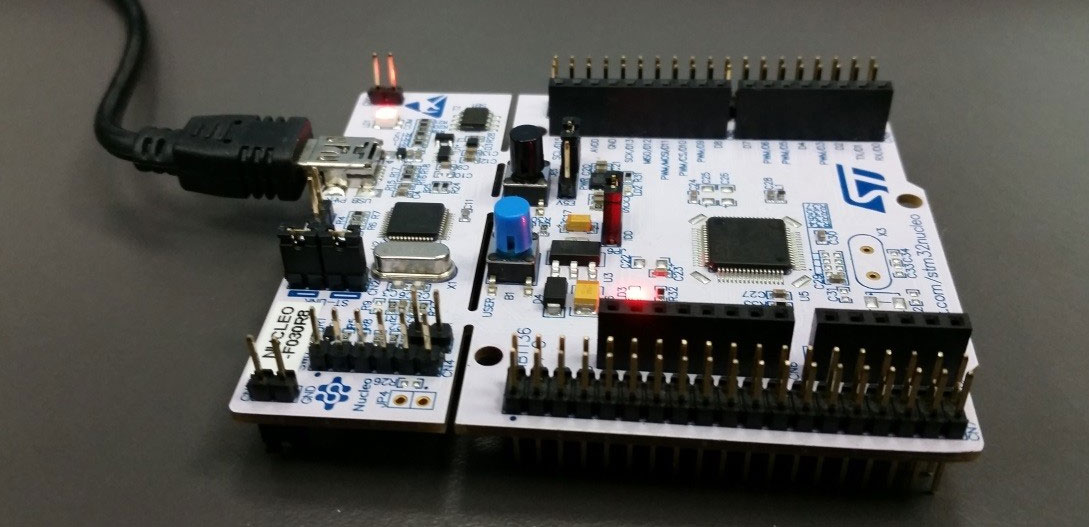
The IO board is developed in C using ST Nucleo board (STM32 mcu). The target controller board processes discrete I/O received on daisy chained SPI devices (opto isolated industrial strength IO). Hence the IO board behave like a bank of daisy chained devices. It also provide 2 CAN bus ports that are interconnected to target.
This project has consisted in providing software & hardware to support the development of a Lift Control system. The main challenge that our custom solution addressed was how to test the controller across a wide range of electro-mechanical Lift configurations meanwhile iterating development.
Working hand to hand with Lift engineers, we developed a complete electromechanical simulation of a Lift system. Alongside such simulator, we developed a custom IO board that interconnect Lift simulation with target controller using exactly same electrical interfaces as in a real Lift installation. A browser HMI interface was then developed to allow developers to reconfigure on the fly the simulation (eg change the number of levels) and generate events such as calls and system faults
This project is unique in allowing a test first approach in the context of an embedded project. By allowing to pretest extensively and easily a large number of deployment configurations, huge cost saving were achieved for the development of the target controller.